 ULS-231 桌面式精密激光锡焊
ULS-231 桌面式精密激光锡焊 ULS-81S旋转恒温精密激光锡
ULS-81S旋转恒温精密激光锡 ULS-OL-81SP 在线式锡膏激光
ULS-OL-81SP 在线式锡膏激光 CR520双工位自动焊锡机
CR520双工位自动焊锡机
传感器是全自动焊锡机的传感系统,相当于人体的感觉器官,是机器人系统的重要组成部分,包括内部传感器和外部传感器。内部传感器主要用于检测全自动焊锡机自身的状态,为全自动焊锡机的运动控制提供必要的身体状态信息,如位置传感器、速度传感器等。外部传感器用于感知机器人的工作环境或工作状态信息,分为环境传感器和末端执行器传感器两种。
2、机械体
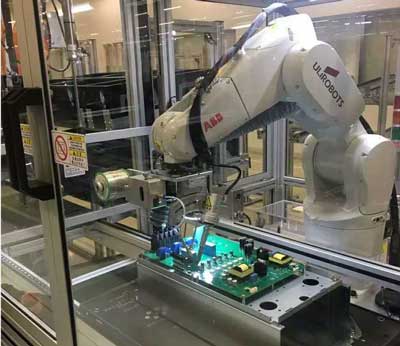
机械体,是全自动焊锡机完成任务的执行机构,一般是机械手,也称操作者,或操作者,在一定的环境下,可以执行控制系统规定的操作。典型工业机器人的机械本体一般由手(末端执行器)、手腕、手臂、腰部和底座组成。机械手通常采用铰接式机械结构,一般有六个自由度,其中三个用于确定末端执行器的位置,另外两个用于确定末端执行器的方向(姿态)。机械臂上的末端执行器可以根据操作要求用焊枪、吸盘、扳手等工作工具代替。
驱动器是机器人的动力系统,相当于人体心血管系统,一般由驱动装置和传动机构组成。由于驱动方式不同,驱动装置可分为电动、液压和气动三种。驱动装置中的电机、液压缸和气缸可以直接与操作机连接,也可以通过传动机构与执行机构连接。传动机构通常有几种类型,如齿轮传动、链条传动、谐波齿轮传动、螺旋传动、皮带传动等。
4、操纵系统
控制系统是机器人的指挥中心,相当于人的大脑功能。它负责处理操作指令信息和内外环境信息,根据预定的本体模型、环境模型和控制程序进行决策,产生相应的控制信号,驱动执行器的各个关节按照所需的顺序沿着确定的位置或轨迹运动,完成特定的操作。从控制系统的组成来看,有开环控制系统和闭环控制系统;从控制方式上,可分为程序控制系统、自适应控制系统和智能控制系统。